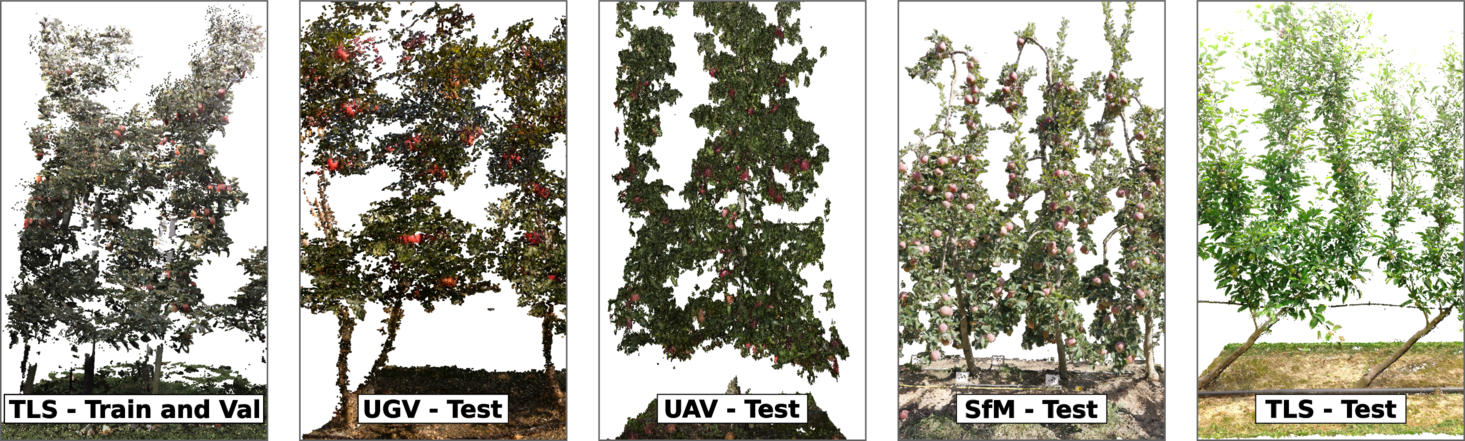
The Dataset
Our dataset, called HOPS, is composed of point clouds collected with three different sensors at Campus Klein-Altendorf near Bonn, Germany. First, we collected point clouds using a TLS placed at multiple locations in the orchard row. Our training and validation set entirely contains point clouds collected with this sensor. Furthermore, we use a few TLS point clouds in the test set, collected in a different year and orchard location compared to the training and validation set. Second, we use point clouds obtained with a bundle adjustment procedure using as input images collected with a UAV equipped with a PhaseOne iXM-100 camera. We flew three missions on the same orchard with a camera angle of 45◦, 90◦, and 135◦ from the ground plane at a height of approximately 20 m. This setup allows us to obtain good coverage of the trees including the lower part of the canopy. The photogrammetric point clouds obtained in this way from the UAV are only included in the test set. Third, we use a RealSense d435i mounted on a mobile robot driving through the orchard rows to collect another part of our test set. Again, to obtain photogrammetric point clouds we use a bundle adjustment pipeline. Furthermore, we label a few point clouds from the Fuji-SfM dataset to obtain a fourth test set from a different setup. This dataset is collected in Agramunt in Catalunia, Spain with a EOS 60D DSLR Canon camera, followed by a bundle adjustment procedure to generate point clouds.
Contacts
Matteo Sodano: matteo.sodano@nulligg.uni-bonn.de
Federico Magistri: federico.magistri@nulligg.uni-bonn.de
How to Use
To download the dataset, please visit this link.
Paper
Our paper is available at this link. If you use our dataset, please cite us:
@inproceedings{sodano2025arxiv,
author = {M. Sodano and F. Magistri and E. Marks and F. Hosn and A. Zurbayev and R. Marcuzzi and M. Malladi and J. Behley and C. Stachniss},
title = {{3D Hierarchical Panoptic Segmentation in Real Orchard Environments Across Different Sensors}},
journal = arxiv,
year = 2025,
volume = {arXiv:2503.13188},
url = {http://arxiv.org/pdf/2503.13188},
}
Also, please cite the papers of the Fuji-SfM dataset:
- Gené-Mola J, Sanz-Cortiella R, Rosell-Polo JR, Morros J-R, Ruiz-Hidalgo J, Vilaplana V, , Gregorio E. 2020. Fruit detection and 3D location using instance segmentation neural networks and structure-from-motion photogrammetry. Computers and Electronics in Agriculture, 169 (2020), 105165.
- Gené-Mola J, Sanz-Cortiella R, Rosell-Polo JR, Morros J-R, Ruiz-Hidalgo J, Vilaplana V, Gregorio E. 2020. Fuji-SfM dataset: a collection of annotated images and point clouds for Fuji apple detection and location using structure-from-motion photogrammetry. Data in Brief (2020), 105591.