Description
In this challenge, you are tasked to provide a complete 3D mesh given a partial RGB-D observation of sweet peppers. You are provided with RGB-D frames with corresponding instance masks and poses where sweet peppers are only partially visible. We ask the participants to predict a 3D mesh representing the complete fruit. Obtaining such information is a fundamental building block for agricultural autonomous systems across different downstream tasks, such as harvesting and yield estimation.
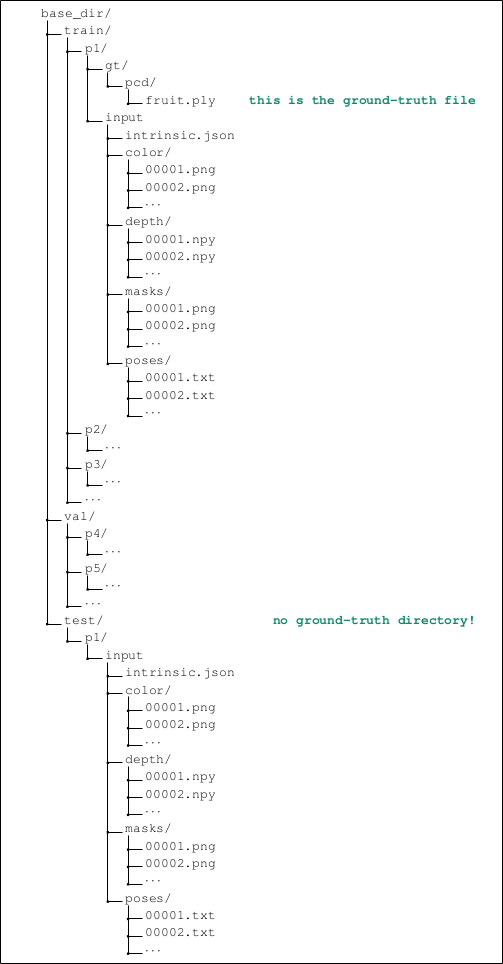
Dataset Structure
To facilitate developments based on our data, we provide a visual representation of the data structure.
Codalab Submission
If you want to use our dataset, visit the codalab page: https://www.codabench.org/competitions/14113
We expect the following data structure for the submissions:

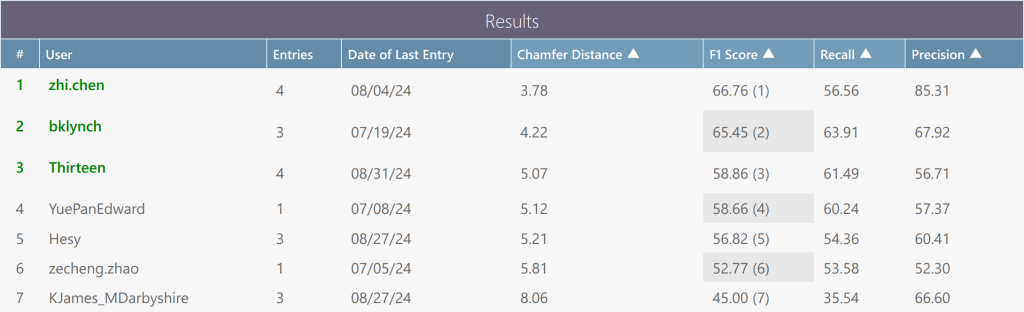
We ran a challenge as part of the CVPPA workshop at ECCV 2024, see https://cvppa2024.github.io/. Here we report the results of the challenge at the time of the workshop:
Download
You can download the entire dataset at https://www.ipb.uni-bonn.de/html/projects/shape_completion/shape_completion_challenge.zip
Resources
We provide a small API to access the data at https://github.com/PRBonn/shape_completion_toolkit. Additionally, we provide a tech report with further details on the dataset creation and baseline results.
How to Cite
If you find this dataset useful, please cite our paper:
@inproceedings{magistri2025icra,
author = {F. Magistri and T. L\"abe and E. Marks and S. Nagulavancha and Y. Pan and C. Smitt and L. Klingbeil and M. Halstead and H. Kuhlmann and C. McCool and J. Behley and C. Stachniss},
title = {{A Dataset and Benchmark for Shape Completion of Fruits for Agricultural Robotics}},
booktitle = {Proc. of the IEEE Intl. Conf. on Robotics \& Automation (ICRA)},
year = 2025,
}Contact
Contact: Jens Behley if you have any questions.
Acknowledgments
This work has been funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany’s Excellence Strategy, EXC-2070 – 390732324 – PhenoRob.